矿用智能车场推车机器人(专利)
概述
我公司为响应国家煤矿安监局《煤矿机器人重点研发目录》运输类第十七条“车场推车机器人”的要求而研发的该机器人,通过无线直接操作,可以满足机器人直接进罐推拉车、弯道推拉车、车场调车等功能。该推拉车机器人对车场长度要求低,不需要额外做推车机基础,能够在弯道上使用,能够在一个水平开采完毕后转移到另外一个水平继续使用,不需要经常更换
配件极大的降低综合使用成本。
主要功能
能够进罐拉(推)车,与罐内阻车器、摇台、安全门、阻车器配合能够实现自动化装罐、卸罐、调车等作业。
主要特点
1)大量采用了新技术,结构更合理,具有高强度、高可靠、维护量小的特点。
2)运动惯性小,启动停止迅速平稳,易于调节,更适用需要频繁启动的场合,运行可靠。
3)手动和自动状态推拉采取电器伺服技术,即启动、停止时缓慢运动,中间过程快速运动,这样既大大减轻了冲击,降低了噪音,延长了机器人的使用寿命,又不会降低效率。
4)推车速度连续可调,也可在运动过程中人为参与调整。
5)推拉机器人采用液动,电池更换方便。
6)推拉机器人像矿车一样直接在轨道上运行,不需要安装地基。
7)推拉机器人与一台矿车尺寸相仿,可像矿车一样进入罐笼,移动方便,凡矿车能够运行的弯道它都能快速通过。可多水平使用。
8)可实现单向马头门拉车推车功能。
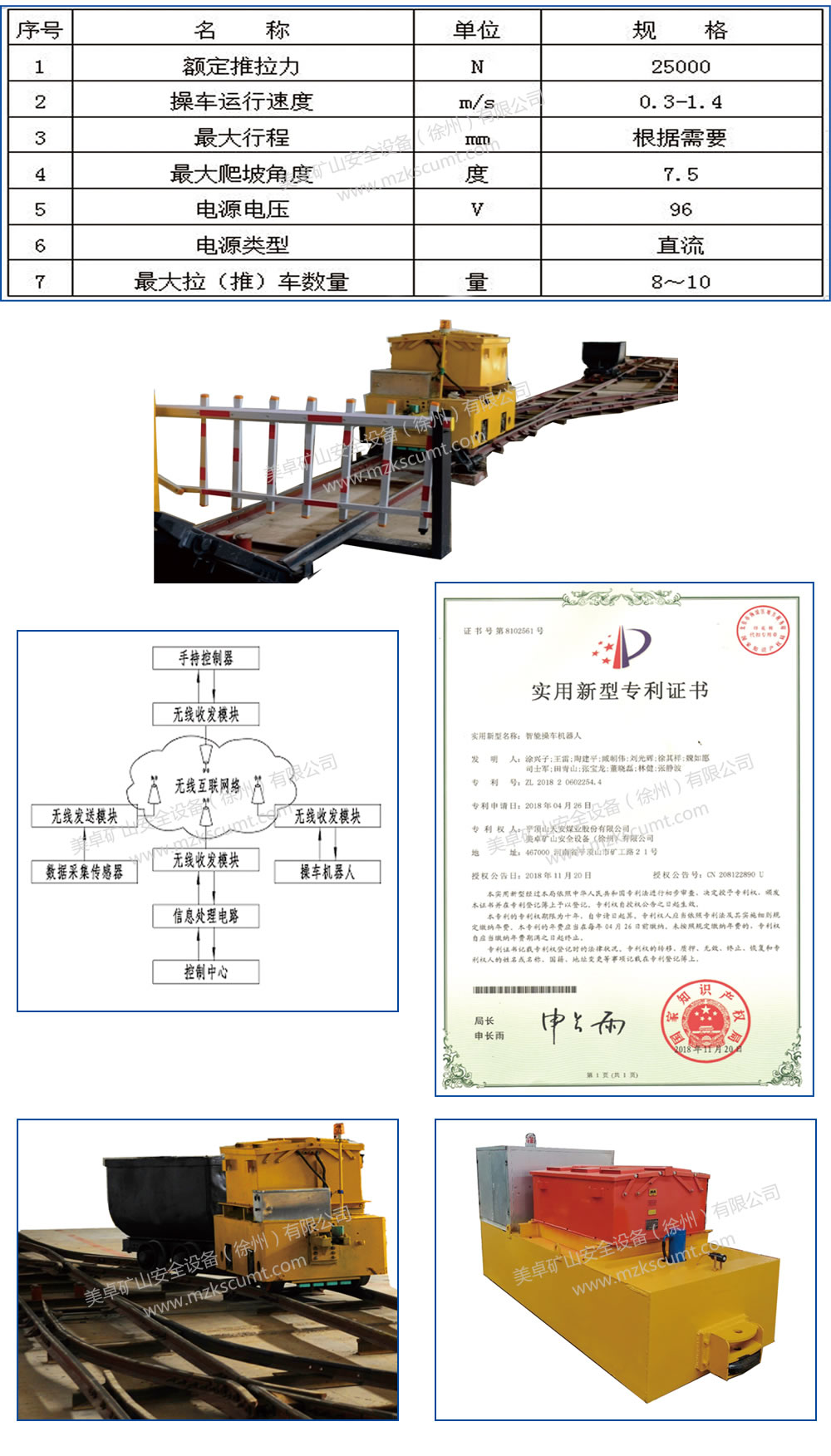
9)适用于各种煤矿矿车1辆或2辆,以及冶金各种规格型号矿车,推车速度为0.3~1.4m/s。
规格参数