环形车场无人值守智能运行系统(专利)

一、概述
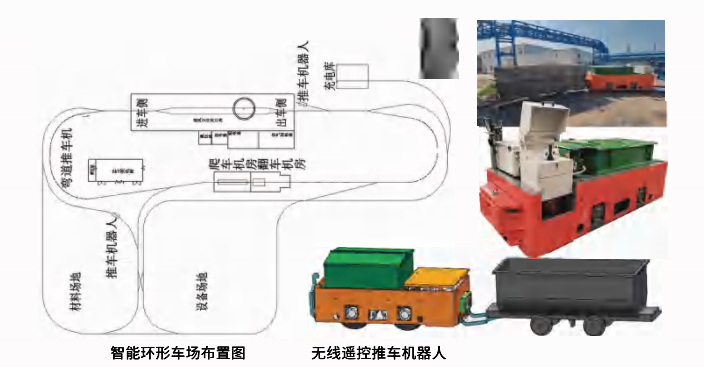
为响应国家煤矿安监局《煤矿机器人重点研发目录》运输类第十七条“车场推车机器人”的要求,我公司研发了环形车场智能推车机器人。采用AI视频监控及自动道岔为辅,自动推车机器人及弯道推车机相辅助的推车系统,基于AI图像智能识别技术、精确定位技术、无线传输技术及模糊控制技术,我们开发了井口车场运行状态感知系统。通过程控或远程无线遥控操作+自动道岔+AI智能图像识别系统,从而形成整个井口车场的从罐笼升井罐门、罐内阻自动开闭+操车系统自动推车+矿车进入环形车场自动运转+空车进入罐笼入井的整套无人值守智能化运转系统。使车场运行达到机械化减人,自动化换人,智能化增效的目的。采用该自动化无人环形智能车场,将会大大提高矿井生产的安全保障能力,加强煤矿的安全生产标准化建设。
二、传统环形车场存在的问题
1)电机车司机+机车摘挂工+道岔报道工,需要的人工多、不安全因素复杂;
2)推车机、翻车机、爬车机、道岔等设备,相互独立,作业过程复杂,无系统性配合;
3)出井车辆类型与状态无自动识别,不能实现车辆的系统自动调度;
4)环形车场智能化不足、分散控制、运行效低。
三、系统主要功能
1)笼罐帘门、罐内阻自动开闭功能;
2)环形场道开系;
3)推车机器人弯道自动推调车功能;
4)环形车场状态AI识别与自动控制功能;
5)石矿车自动及高功能;
6)推车机器人运行遇障自动避障功能。
四、系统主要特点
1)实现系统减人:2/3,系统运行效率提升30%以上;
2)罐笼自动化:罐笼到位后,实现罐笼罐帘门和罐内阻车器自动开闭功能,节省人工;
3)操车自动化:
a、矿车、平板车入井时,实现超重、超宽、超高、超长等保护功能
b、井口车场人员监控功能,实现井口等重要场合外人进入实时监控提醒功能
c、采用手持遥控器操作模式,取消信号工岗位,把勾工直接将作,节省人工;
4)环形车场动化:
a、调度、运行和控制等功能集成到中控台及遥控终端,调车灵活,省时省力;
b、通过信息采集、数据处理、图像识别、远程遥控实现一键控制;
c、推车机器人+翻车机+爬车机+推车机+道岔智能运行;
d、推车机器人前后视频监控+运行遇障自动停车,避免运行事故;
e、采取AI图像识别+控制技术,使整个环形车场无人化操作,精简人员,减员增效。
五、系统组成
■ 系统主要由罐笼自动化、操车自动化及环形车场自动化三大系统组成;
■ 罐笼自动化系统:主要包括自动罐帘门和自动罐内阻等;操车自动化改造系统:手持遥控终端、防四超 (超重、超长、超宽、超高)系统和区域人员监控与安全闭锁系统;
■ 环形车场自动化系统:自动推车机器人、自动道岔、AI智能监控与识别等。
(一) 环形车场自动化系统
1、无线遥控推拉车机器人
主要由电池组供电系统、高效磁阻调速电机驱动系统、制动系统、变频调速控制系统、运行避障系统及无线遥控系统等部分组成。
特点:
1)控制方式:远程程控、遥控器控制、就地控制,变频调速,车速0-3m/s进行调节。
2)驱动系统:采用高效永磁 (磁阻)调速电机驱动、前后双驱动。
3)制动系统电气制动、外动力自动制动。
4)机器人采用 LED 前后照明灯,每个照明灯都有白灯和红灯,白灯照明、红灯警戒。
5)自动推车机器人可实现弯道、直道、进罐进行推拉车。
6)遥控系统:控制人员可在控制室通过中控台或者无线遥控器操作,无线遥控器能实时控制自动推车机器人的起动、停车、加速、减速、前进、后退等功能。
7)自动推车机器人前后均设置识别摄像头,推车和后退时均能实时看到车前后情况,确保远程控制的安全性,自动行驶时遇到人员自动停车。
2、弯道推车机
销齿弯道推车机由一列在轨道上运行的销齿小车组成销齿驱动装置驱动销齿小车运行,实现直道弯道推车、拉车等作业。
3、矿用自动道岔装置
通过直线电机或液压源驱动道岔自动开闭,开闭状态实时监测,确保道岔按照控制台要求进行开闭。确保推车系统将车辆推送到指定位置。

4、基于AI图像识别技术的中控系统
智能AI视频识别集中控制系统针对“人的不安全行为”、“物的不安全状态”“环境的不安全因素”,将计算机视觉 (CV)技术与视频监控规则深度融合,满足煤矿定制化实时视频智能识别需求,实现生产管理过程中安全管理问题的可感知、可预警、可追溯、可管理。
中控系统包括信息采集、数据处理、液压控制、视觉识别控制、远程遥控及可视中控台等.通过可视型中控台和遥控器,操作人员可根据车辆运行位置控制推车机器人调车、推车等动作,远程控制实现减人增效,一个操作工即可控制整个车场。

(二)罐笼智能化系统(自动罐帘门、音响照明及视频监控系统
系统介绍
罐笼智能化系统由罐笼、防爆电源、充电系统(无线或者有线)、自动罐帘门、照明(MP3音乐播放)应急通讯系统、罐内自动阻车器、张力监测等部分组成。
罐笼电源系统
罐笼电源系统由矿用隔爆兼本安型钾离子蓄电池电源、无线充电装置及配套的安全电源管理软件构成。
1、自动罐帘门
■ 自动罐帘门采用电机驱动、罐笼到达指定位置时自动操作门挡垂直折叠升降,从而实现罐帘门开启与关闭;
■ 具有自动开闭罐帘门功能。操作方式,手动按钮、遥控和自动。可实现与操车等的联动控制实现罐帘门自动化,提升矿井自动化水平;
■ 多重安全闭锁,罐位、罐门、安全门之间多层闭锁,高可靠性;
■ 防夹功能。当罐帘门上提遇到阻力达到一定值时,罐帘门会自动停止;
■ 罐门开闭速度可调功能;
■ 上电自学习功能。上电后,自动检测和校准罐帘门位置,方便维护。
■ 帘门可人为掀开。应急时,可迅速手动将罐帘门掀起,不影响应急通行。

2、音响照明系统
音响照明装置布置于罐笼内防水棚下,解决了罐笼离开井口后一处漆黑的境况。为人员乘罐提供良好的环境,提升乘罐舒适性。同时音响照明装置内集成语音或音乐播放功能,可播放音乐或是企业宣讲等音频内容。
3、无线视频及对讲系统
无线视频及对讲系统由隔爆兼本安型无线交换机、矿用本安型摄像仪(本安型云台摄像仪)、语音对讲装置、隔爆电源无线视频监控系统软件等组成。
系统实现罐笼内无线视频采集及语音通信、语音双向通话等功能,视频清晰度达到黑白摄像仪日光条件下图像采集效果
4、运行信息罐内显示系统
由罐内显示终端、井口通信中继及车房信息主站构成。车房信息主站负责将提升机及信号系统的状态信息进行收集,通过有线通信传送到并口通信中继,中继将有线通信信息通过无线方式发送给罐内显示终端.罐内显示终端对接收到的信息进行显示展现。显示信息有日期、日间、当前打点信号、罐笼速度、罐笼实时位置(深度)及运行方向等。
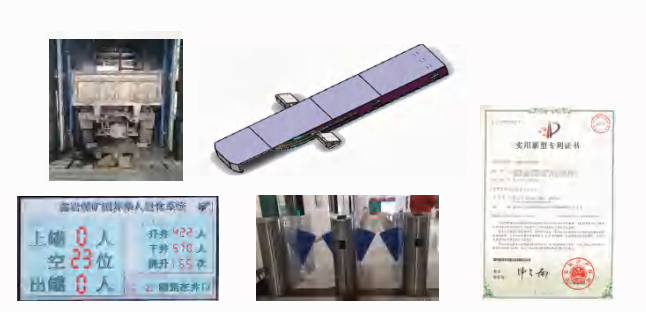
5、罐内自动阻车器
罐内阻车器严重制约了矿山操车自动化的发展,存在问题:一是需要人工开闭,二是容易出现事故,罐内阻可以通过机械式、液压式和电动式来实现自动化开闭。机械式通过摇台搭接实现开闭,液压式是通过外部曲轨,罐笼到位后自动打开,电动式则是通过罐笼上电源给防爆电机供电,
防爆电机驱动阻车器开闭,方式有如下两种。
6、无轨胶轮车自动阻车系统
组成:由防爆电源、充电系统、驱动系统、电控系统等部分组成。
性能特点:自动化安全闭锁 无线遥控
1)使用安全:阻挡采用复合材料块,阻车时自锁性更强;
2)性能可靠:传动环节少,故障率低,多重罐位闭锁
3)操作简单:把钩工遥控操作、程控自动操作;
4)适用性强:根据罐笼及胶轮车尺寸定制化设计布置;
5)安装方便:直接铺设在罐笼内,螺栓连接即可。
7、罐笼乘人量化系统
罐笼乘人量化系统升级人员乘罐方式,实现上井口乘罐人员的量化和信息化。由进出闸机、人机交互屏及到位传感器等组成。
功能与特点
1)计数功能:检测并显示本次上罐和出罐人数;
2)当上罐人员达到乘罐人数上限时给出提示并关闭闸门;
3)语音功能:当达到最大允许乘罐人数后,将语音提示等待下一罐;
4)统计功能:记录当天提升系统提升罐数、下井及升井总人数;
5)信息功能:提供数据接口,供与矿井信息化平台共享数据信息。
(三) 操车智能化改造系统防超载、手持遥控终端、车场区域监控系统
1、防四超系统
主要由轨道防超载称重系统,防超高、超宽、超高系统等组成。
防超载系统:基于动态轨道称重方式,实现了矿车的动态称重。可避免了因提升超重造成的事故,节约了处理提升超重故障的时间,提高了工作效率。
防超高、超宽、超高系统:通过AI摄像头+红外传感器对下井设备进行长宽高测量,超过规定尺寸进行警示及闭锁。
2、手持遥控终端控制系统
1)副井操车信号远程控制系统,配套现有矿用副井提升信号及操车监控装置,采用手持无线遥控器方式控制,实现操车及信号遥控操作。在操作台上有遥控控制及操作台控制的转换按钮,能一键切换。
2)在原PLC控制箱内增设内置遥控接收器,通过遥控器与原PLC控制箱的通讯连接实现接收遥控发送器对应的控制信号,并转发给原系统,从而实现通过遥控器远程控制信号、操车系统的功能。
3)把钩工配置矿用本安型遥控发送器,实现远方无线控制信号系统操作操车系统功能,取消信号工岗位。
3、车场区域监控系统
以AI高清摄影仪为基础,利用人工智能分析与处理技术,形成一套有效结合智能分析、警戒设防、录像抓拍为一体的安全防范系统。
该系统与推车机系统进行闭锁,避免人员在推车机前方而引发安全事故。
上一个:没有了
下一个:没有了